
Este é o primeiro post do meu novo entretenimento: hack, comunicação e estudo de aplicações em robótica do sensor PAN3101.
Estes sensor tem algumas características muito interessantes e úteis, daí este meu interesse:
* permite a detecção em velocidades de até 21inches/s, qualquer coisa como 0.53m/s
* Grande resolução, configurável até 800CPI
* Interface série para transferência de dados e programação
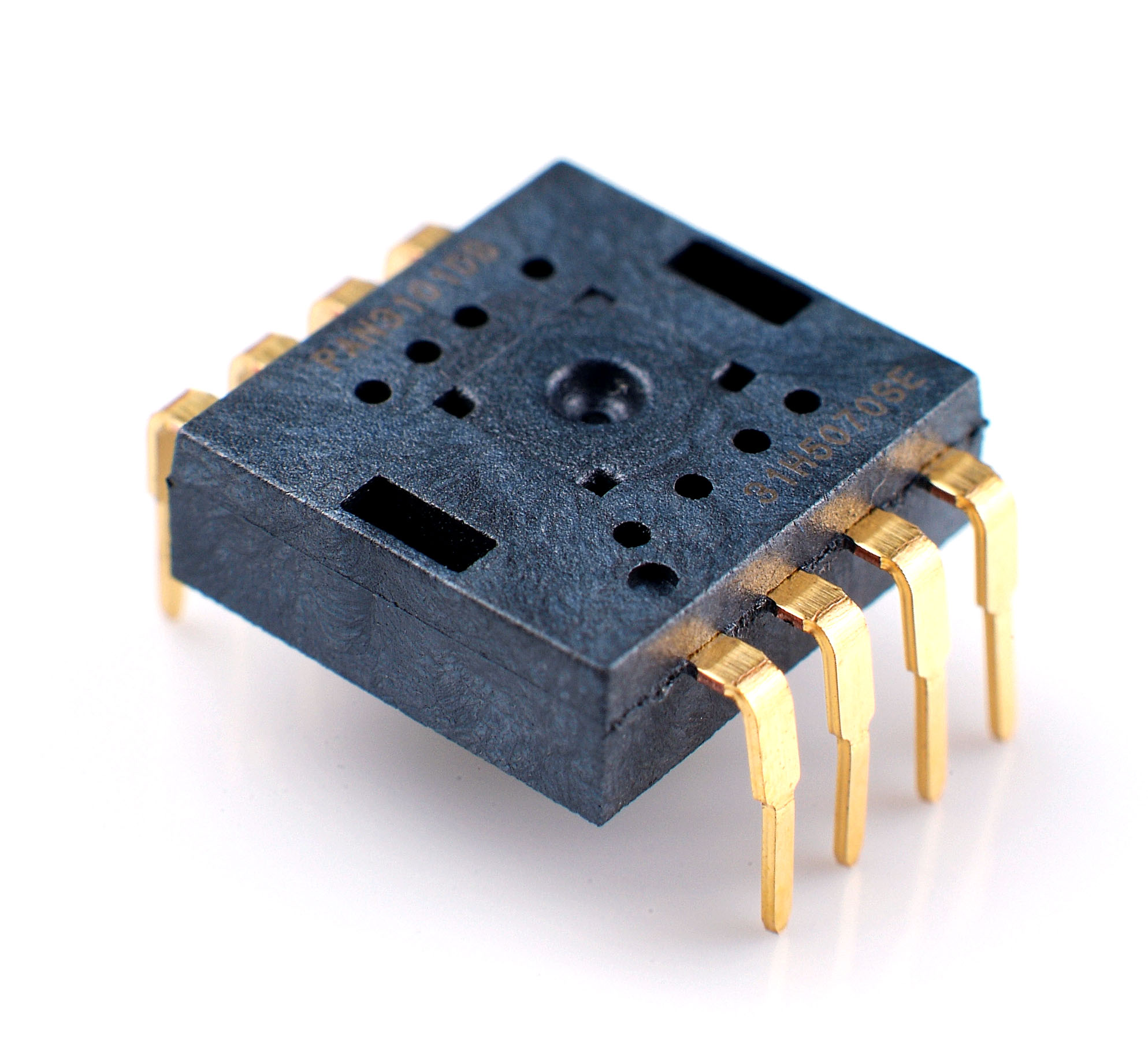
Esta última é o que torna este sensor muito útil, pois ao contrário dos seus primos Chineses (cujas aplicação são inteiramente para ratos ópticos) necessita de um controlador externo, pois este DIP de 8 pinos é APENAS o sensor. Assim com qualquer MCU's podemos efectuar comunicação com o PAN3101 e recolher dele as informações vectoriais do movimento.
Quando solicitado o registo 0x02 e o registo 0x03, a resposta será o quando se deslocou em Y e em X, respectivamente, desde a última solicitação.
Se fizermos a leitura do registo 0x02, a resposta será um valor de -128 a +127, que corresponde ao quanto se deslocou, e esse registo é colocado a zero de imediato. O mesmo acontece com o registo 0x03.
No ebay é possível comprar este sensor, sem qualquer "extra".
Recomendável?
Não! Comprar um rato com este sensor isso já é outra história...
Na compra do rato, além do sensor, vem também a lente que fica por baixo dele e que permite o melhor foco possível para a sua utilização.

Já falei em cima que este sensor possui 2 registos que correspondem ao eixo X e Y do seu movimento.
Mas afinal, os valores recebidos são o quê? Distância, certamente... , mas como relacionar o valor recebido com a distância percorrida?
Isto já teria grande interesse em robótica...
No inicio falei de 800CPI, isto quer dizer 800 counts per inch, ou seja, uma contagem a cada 31.75µm.
Vamos supor que são devolvidos os seguintes valores:
X = +100
Y = +50
De forma a se entender melhor, já se pode fazer a relação e obter:
X = 3.175mm - desde a última leitura
Y = 1.5875mm - desde a última leitura

Por agora é tudo... tenho de guardar algo para as partes seguintes :D
Finalmente consegui arranjar um rato com este sensor e mal possa já vou tentar fazer alguns testes e testar toda esta teoria...





{kind=link}
0 Responses so far.
Enviar um comentário